AGV的(de)主要導引方(fāng)式介紹(shào)
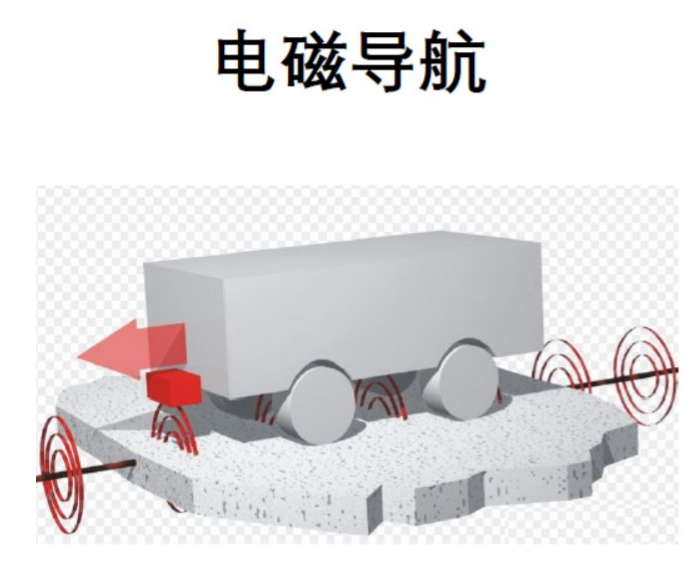
1、電磁導引
電磁導引是較為(wéi)傳統的導引方式之一,目前仍被許(xǔ)多係(xì)統采用,它是在AGV的行駛路徑上埋設金(jīn)屬線,並在金屬線加載導引頻率(lǜ),通(tōng)過對導引頻率的識別來實現AGV的導引。
電磁導引主要優點是引線隱蔽,不容易汙(wū)染(rǎn)和(hé)破(pò)壞,導引(yǐn)原理簡單而可靠,便於控製和通訊,對聲光無幹擾,製造成本較(jiào)低(dī)。
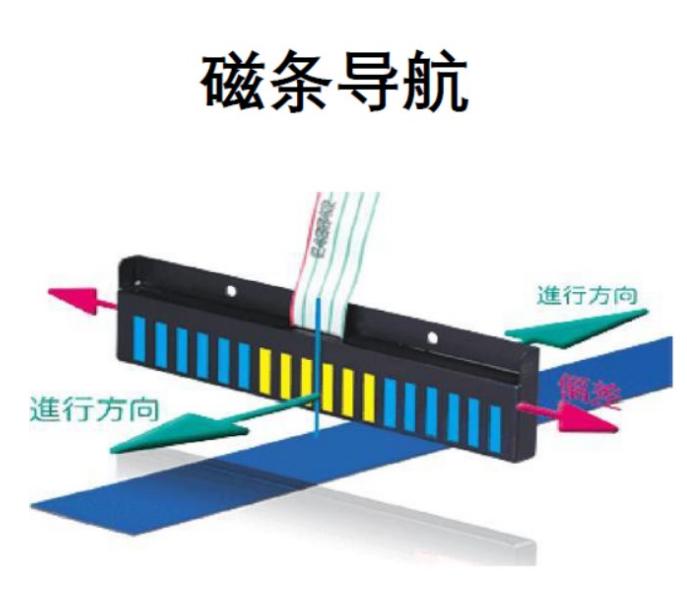
2、磁條導引
磁帶導(dǎo)引技術與電磁導引相近,用在路麵上貼磁(cí)帶替代在地麵下埋設金屬線,通過磁感(gǎn)應信號實現導引。
磁帶導引靈活性比較好,改變或擴充路(lù)徑比較容易,磁帶鋪設(shè)也相對(duì)簡單但此導引方(fāng)式易受環路周圍金屬物質的幹擾,由於磁帶外露,易被汙染難(nán)以避免機械損傷,因此(cǐ)導引的可靠性受外界因素影響較(jiào)大,適合環境(jìng)條件(jiàn)較好,地麵無金屬物質幹擾(rǎo)的場合。
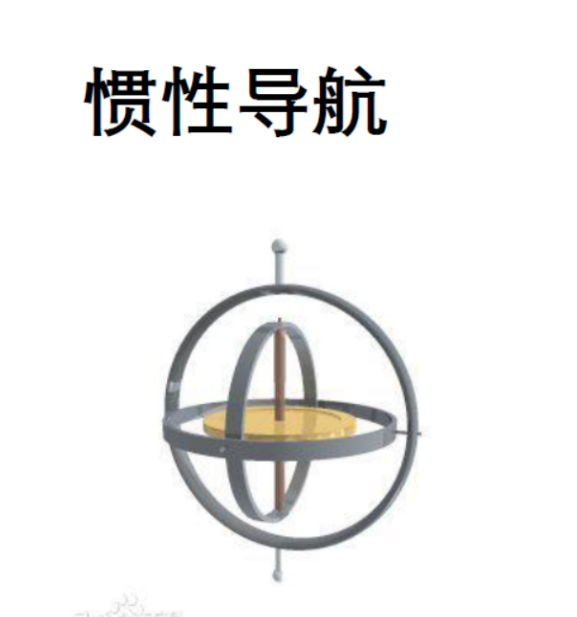
3、慣性(xìng)導引
慣性導引是在AGV上安裝陀螺儀,在行駛區域的地麵上安裝定位塊,AGV可(kě)通過對陀螺儀偏差信號與行走距離編碼器的(de)綜合計算,及地麵定位塊信號(hào)的比較(jiào)校正來正(zhèng)確定自(zì)身的位置和方向,從而實現導(dǎo)引。此(cǐ)項技術在航天(tiān)和軍(jun1)事上較早運用(yòng)其主(zhǔ)要優點(diǎn)是技術先進,定位準(zhǔn)確性高,靈活性(xìng)強,便於組合和兼容,適用領域廣。
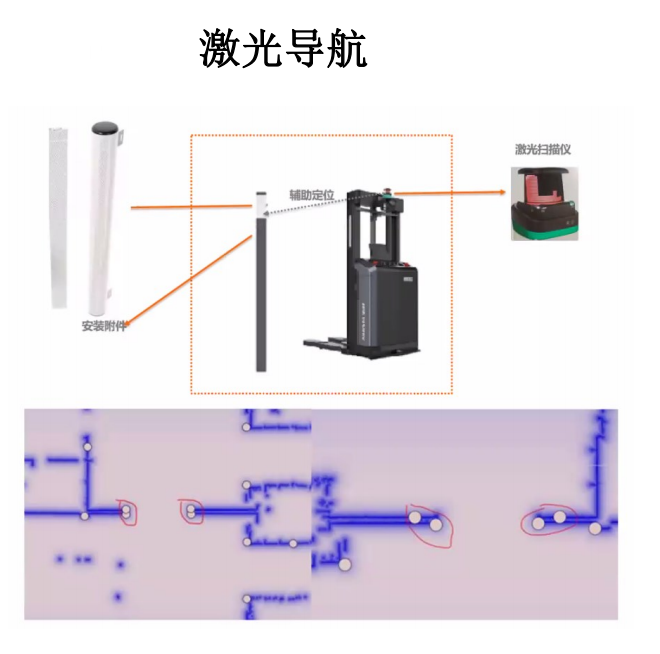
4、激光導引
激光導引有兩種模(mó)式:一種是在AGV行駛路徑的周圍安(ān)裝(zhuāng)位置精確的激光發射板,AGV通過發射激光束,同時采集由反射板反射的激光束,來確定其當前的位置和方向(xiàng),並通過連續的三角幾何運算來實現AGV的導引。
另一種是自然(rán)導引,自然導引是通過激(jī)光測距結合SLAM算法(fǎ)建(jiàn)立小車的整套行駛路(lù)徑地圖,不(bú)需要任何的輔助材料,柔性化(huà)程度更高,適(shì)用於(yú)全局部署!
激光(guāng)導引最大(dà)的優點是AGV定位精確地麵無(wú)需其他定位設施,行駛路徑可靈活(huó)多變,能夠適合多種現(xiàn)場環境是(shì)目前(qián)許多AGV生產廠家(jiā)優先采用的(de)先進導引方式。
技術在航天和軍事上較早運用,其主要優點是技術先進,定位(wèi)準確性高,靈(líng)活(huó)性強。
激光導航的缺點:製造成本高,對環境要(yào)求較相(xiàng)對較高(外界光線(xiàn),地麵(miàn)要求,能見度要求等)。
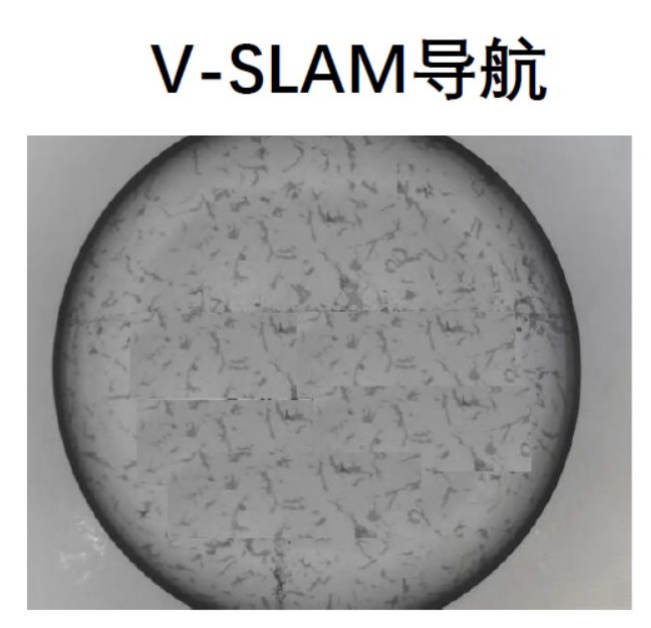
5、視覺(jiào)導引(yǐn)
視覺導引有兩種:-種是利(lì)用攝像(xiàng)頭實時采集行駛路徑周圍環境的圖像信息(xī),並與已建立的運(yùn)行路徑周圍(wéi)環境圖像數據庫中的信息進行比較,實現對AGV的控製;
另一種是基於二維碼的圖像識別方法利用攝像頭掃描地麵二維碼,通(tōng)過掃碼(mǎ)定位技術實現路徑導航。