動態路(lù)徑規劃與避障(zhàng)是自動駕駛、無人機、無人車等智能係統中的關鍵技術,其目的是(shì)在複雜環境(jìng)中實(shí)時生成安全、高(gāo)效的路徑並避開障礙物。以下是關於如何進行動態路徑規劃與(yǔ)避障的(de)詳細說明:
全局路徑規劃與局部路徑規劃(huá)的結合
動態(tài)路徑規劃(huá)通常需要結合全局(jú)路徑(jìng)規劃(huá)和局部路徑規劃來實現。全局路徑規劃負責製定從起點到終點的整體路徑,而局部路徑規劃則在執行過程中根據實時環境信(xìn)息進行路徑調(diào)整。例如,改進的A*算法可以用於全(quán)局路徑規劃(huá),而動態窗口法(DWA)或時間彈性帶(dài)(TEB)算法則用於局部路徑規劃,以實現(xiàn)實時避障。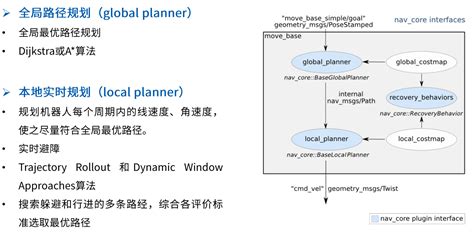 【路徑規劃】move_base、路(lù)徑規劃算法、局部避障(zhàng)算法
【路徑規劃】move_base、路(lù)徑規劃算法、局部避障(zhàng)算法動態避障策略
動態(tài)避障策略包(bāo)括基於傳感器(qì)的(de)實時障礙物檢測與動態路徑調整。常用的技術有碰撞檢測、局部規劃與避障修正。例如,無人(rén)機在飛行過程中會遇到動態障礙物(如其他飛行器或行人),需要通過動態避障策略實(shí)時調整飛行路徑。此外,基於(yú)人工勢場法的局部動態避障路徑規劃算法通(tōng)過改進勢場環境及力,解決了(le)傳統方法中的局部極小值和目標不可達問(wèn)題。 流體擾動原理的動、靜態避障三維軌跡規劃算法實現
流體擾動原理的動、靜態避障三維軌跡規劃算法實現算法選(xuǎn)擇與優化
不同場景(jǐng)下可(kě)以選擇不同的算法。例如,在自(zì)動駕駛中,可以采用基於貝(bèi)塞爾曲線(xiàn)的局部障礙避障路徑規劃算法,以提高車輛的安全性、舒適性和穩定性。在(zài)無人水麵艇(USV)中,速度障礙法通過在速度空間構建三角區域來判定碰撞風險(xiǎn),並從非三角區域中找到最優速度矢量以避障。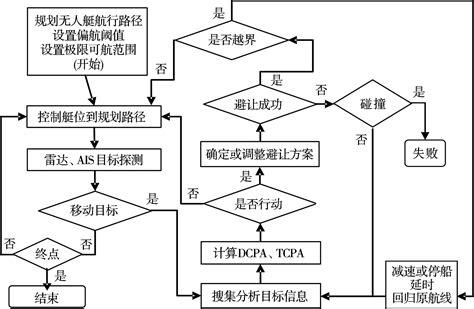 基站雷(léi)達(dá)與AIS引導的水麵(miàn)無人艇遙控係統
基站雷(léi)達(dá)與AIS引導的水麵(miàn)無人艇遙控係統多傳感器融合與環(huán)境建(jiàn)模
多傳感器融合技術可以提高障礙(ài)物檢測的準確性和魯棒性。例如,移動機器人可以(yǐ)通過多(duō)激光傳感(gǎn)器(qì)融合技術感知環境障礙信息,並結合改(gǎi)進的A*算(suàn)法規劃全(quán)局避障路徑。此外,基於三維SLAM技(jì)術的路徑(jìng)規劃算法能夠采集環境點雲數據,構建全局地圖並實(shí)時更新路徑。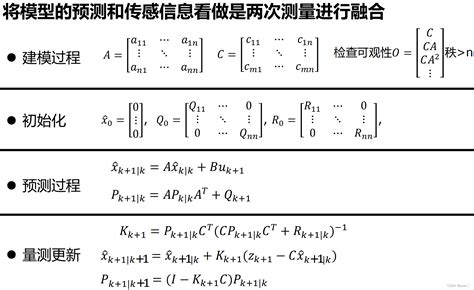 自動駕駛感知——多(duō)傳感器融合技(jì)術
自動駕駛感知——多(duō)傳感器融合技(jì)術深度(dù)學習與強化學習的應用
深度學習和強(qiáng)化學習技術近年來(lái)被廣泛(fàn)應用於動態路徑規(guī)劃與避障(zhàng)中。例如,基於深度強化學習(xí)的無(wú)人小車雙層(céng)路徑規劃方法結合了全局(jú)規劃和局部避障,提高了路徑規劃的全局性和避障的(de)動態性。此外(wài),基於模(mó)型預(yù)測控(kòng)製(MPC)的方法也能夠有(yǒu)效應對動(dòng)態障礙物。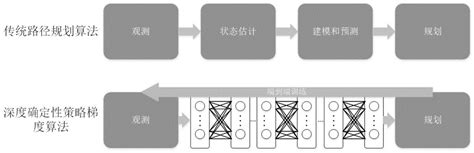 基於(yú)深度強化學(xué)習的無人機感知與避障一體化方法及設備與流程
基於(yú)深度強化學(xué)習的無人機感知與避障一體化方法及設備與流程仿(fǎng)真與實驗驗證
動態路徑規劃與避障算法通常需要通過仿(fǎng)真和實驗驗證其有效性。例如,無人駕駛農機的路徑規劃算法通過仿真測試驗證了其避障能力和路徑(jìng)平滑性(xìng)。在實驗中,通過多次測試可以評估算法在不同障礙物條件下的表現(xiàn),並優化算法參數以(yǐ)提高性能。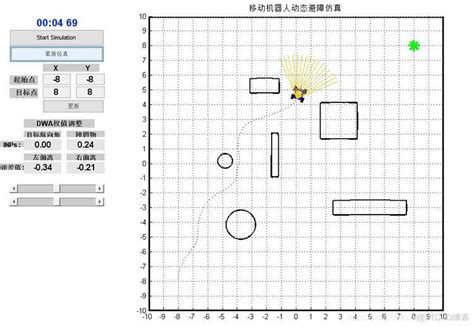 【路徑規劃】基於改進動態窗口法DWA實現機器人動態避障matlab源碼
【路徑規劃】基於改進動態窗口法DWA實現機器人動態避障matlab源碼
動態路徑規劃與避障是一個複(fù)雜且多(duō)學科交叉的研究領域,涉及全局與(yǔ)局部規劃的結合、動態避障策略、算法優化、多傳感器融合、深度學習等多種技術。通過不斷的研究和實踐,這些技術正在逐步提升智能係統的自主導航(háng)能(néng)力和安全性。