所謂AGV指的(de)是自動(dòng)導引車(Automated guided vehicle),是AGV機(jī)器人係統AGVS(Automated guided vehicle systems)的一個組成部分。香蕉直播目前討論的主要(yào)是預定路徑的AGV,它(tā)是一(yī)種基於地麵的物料搬運裝置,由非接觸式導引係統自動控製和導引。主要由安(ān)全裝置(急停按紐、激光(guāng)雷達、安全PLC、安全速度模(mó)塊)、控(kòng)製裝置、負載搬運(yùn)裝置、驅動裝置,電池和電機等組成。
目前對比歐洲相關安全標準,國內AGV存在的最大問題是未(wèi)考(kǎo)慮控製係統安全部分相(xiàng)應的安全要求,將普通控製功能和(hé)安全控(kòng)製功能混(hún)為一談,遠遠達不(bú)到標準要求。香蕉直播(men)在(zài)為國(guó)內AGV進行產品(pǐn)認證的過程中,總結出以下六個方麵(miàn)問題:
一、機械製動係統
國內的AGV機器(qì)人普遍沒有機械製動係(xì)統,多數采用電子刹車,更談不(bú)上滿足動作要求和製動要求(qiú)。
⑴安全要(yào)求:
AGV應安裝機械製動係統。
⑵功能要求:
采用斷電製動;
電(diàn)源中斷、故障時工作;
小車失去速(sù)度或轉向時工作。
⑶製動要求:
製動裝置要(yào)保證AGV機器人及其(qí)允許的(de)最大負載,能夠保持在製造商規(guī)定的工作坡度上,即不溜車(chē);考慮到負載、速度、摩擦、坡度(dù)和磨損的情況,製動係統在激光雷達的檢測範圍能夠停止AGV;當車(chē)輛處於手動模式時,製動器應符合ISO 6292的要求(qiú)。
二(èr)、 穩定性
目前,大(dà)部分搬運裝(zhuāng)置主要是依靠摩擦力來保(bǎo)持貨架與AGV的相對位置關係;緊急情況下,一(yī)旦拍下急停按鈕,貨架很有可能會傾倒或者失穩。大部分AGV機器人上,未安裝安全PLC或安全繼電器,未考慮控製係統安全相關部分的性能(néng)等級要求。
安全要求:
⑴負載搬運裝置:
應設計成在任何操作模式下,包括緊急停止(zhǐ)和裝卸,負載不能從確定的位置移動;
如果提升高(gāo)度(dù)超過1.8米,應通過試驗驗證(zhèng);
如果(guǒ)提升高度不超過1.8米,可以通過計算驗證。
⑵穩定性要求:在所(suǒ)有操作位置,在負載搬運和行(háng)駛過程(chéng)(包括緊急停止)中,應(yīng)確保AGV機器人的穩定(dìng)性。
⑶控製係(xì)統安全相(xiàng)關部分:如果用於負載搬運(yùn),速度控製(zhì)和轉(zhuǎn)向控(kòng)製的控製係統(tǒng)故障,可能導致(zhì)穩定性喪失,這些控製係統的安全相關部分應符合ISO 13849-1:2015:Cat.2。
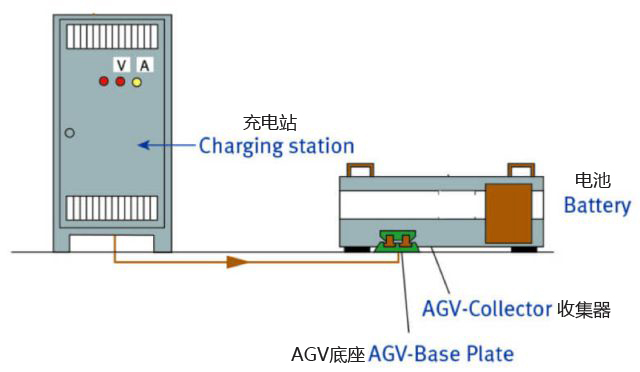
三、充電係統
目前存在的問題:
多數(shù)AGV機器人充電連接(jiē)器的設計(jì),未考慮EN 1175-1附錄A的相關要求,設計較簡單,存在意(yì)外(wài)觸(chù)電的風險;
多(duō)數AGV的電池是定製的,但定製時並未考慮相應安全標準,未通過相應安全認證,存在重大安全隱患;
自動充電係統,不能有效判斷來充電的是否是AGV,以及相應規格等;
充電係統(tǒng)安全部分,不能符(fú)合ISO 13849-1:2015:Cat.1。
安全要求:
⑴充電連接:
應能防止意外觸及AGV機器人和充電(diàn)樁上的充電連接(jiē);
自動(dòng)充電係統,應設計為:
隻有AGV機器人連(lián)接到充電係統時,才能啟動充電連接;
當(dāng)車輛從充電係統離(lí)開時,應關閉充電連接;
充電係(xì)統安全部分,應符合ISO 13849-1:2015:Cat.1。
⑵電池:
鉛酸和堿性(鎳鎘或鎳鐵)型電池,應符合EN 1175-1 5.1的要求;
對於(yú)其他類(lèi)型的電池,需要滿足相應標準要求(qiú)。
⑶電池連接器:應(yīng)符合EN 1175-1附錄A的相關要求。
四、人員檢測裝置
目前存在的問題:
①存在檢測(cè)盲區,不能覆蓋AGV機器人或貨架的整(zhěng)個寬度;
②AGV機器人以(yǐ)及貨(huò)物可能與人發生擠壓或撞擊;
③控製係統(tǒng)安全相(xiàng)關部(bù)分達(dá)不到ISO 13849-1:2015:Cat.3的要求。
安(ān)全要求:
⑴每個行駛方向,都可以檢測AGV機器(qì)人或貨物的整個寬度;
⑵在(zài)AGV的剛性部件/貨物與(yǔ)人接觸之前,信號提示,使AGV能夠(gòu)被(bèi)製動係統停止(zhǐ)。
⑶應盡可能靠近地麵檢測人員,可以(yǐ)檢測以(yǐ)下試件:
直徑200mm,長度600mm,與AGV路徑(jìng)與卡車的路徑成直角,且位於行駛路(lù)徑上任何位置;
直徑70mm,高度400mm的試件,垂直放置,在AGV路徑(jìng)內。
⑷觸(chù)發人員檢測裝置(如緩衝器),不會對人員(yuán)造成傷害。此外,還應滿足:
直徑200mm,長度(dù)600mm,該試件(jiàn)的觸發力不得超(chāo)過750N;
直徑70mm,高度400mm,該試件的觸發力不得超(chāo)過(guò)250N;
⑸當緩衝器被從最大速度和負載下,壓縮到停止位置(zhì)時的力不得超過400N。
⑹控製係統安全相關部分:人員檢測裝置的安全相關部件應符合ISO 13849-1:2015:Cat.3;
五、緊急停止
目前存在的問(wèn)題:
①急(jí)停裝置(zhì)安裝位置不(bú)合理,從兩(liǎng)端和兩側不(bú)易觸(chù)及;
②缺少急停按鈕(niǔ)襯托(tuō)色;
③急停功能(néng)不符(fú)合標(biāo)準要求(qiú),未(wèi)采用0類停機,未切斷所有運(yùn)動部(bù)件的危險(xiǎn)電源;
④控製係(xì)統安全相關(guān)部(bù)分達不到ISO 13849-1:2015:Cat.3的要求。
安全要求:
⑴急(jí)停裝置:
緊急停止裝置的執(zhí)行器應易於從AGV機器人的兩端和兩側看到,可識別和接(jiē)近。在AGV在端部承載負載的(de)情況下,可以(yǐ)從另一端接近急停裝置;
急停器(qì)件的按鈕應為紅色,周圍襯托色應為黃色;
⑵急停功能:
△應提供符合EN 13850標(biāo)準的0類(斷電)緊急停止(zhǐ)裝置;
△切斷所有運動部件的危險電源;
△能夠通過下列方法之一,中斷正常的最大電流(包括電動機起動電流):
①96V以下(含96V),可使用附(fù)錄A Range1中定(dìng)義的電池連接器;
②高於96V電池連接器不得用(yòng)於緊急斷開(kāi);
③手動(dòng)隔離器件,至少(shǎo)斷開(kāi)一極;
④手動操作的控製開關,切斷電源接觸器線圈的電源,同時切斷開(kāi)關電源電路(例如逆變器或單獨電機的控製器(qì));
⑶控製係(xì)統安全相(xiàng)關部分:急停裝置的安全相關部件應符合ISO 13849-1:2015:Cat.3。
六、控製(zhì)係統安全相關部分
AGV機器(qì)人各個安全功能控製係統安全(quán)相關部分需要滿足的類別要求請看(kàn)下圖。

AGV控製係統(tǒng)安全相關部分(fèn)類(lèi)別
以上內容為目前國內AGV機器(qì)人(rén)安全技術標準存在的(de)一些問題(tí),廠家做到以(yǐ)上六項安全(quán)要求,用戶可以安心使用AGV機器人 。